
変形型月面ロボット
(Lunar Excursion Vehicle 2(LEV-2)愛称「SORA-Q」
(Lunar Excursion Vehicle 2(LEV-2)愛称「SORA-Q」
宇宙探査イノベーションハブとタカラトミーは2016年から昆虫型ロボットの研究開発のために、研究課題「小型ロボット技術 制御技術」に関する共同研究を進めてきました。その後2019年にソニーグループが、2021年に同志社大学が加わりました。
その研究成果である変形型月面ロボット(愛称:SORA-Q)は、2021年にLAMPEミッション、2022年にSLIMミッションへの搭載が決定しました。
Please click here for the English version of the site.

共同研究の役割
| 機関 | 役割分担 |
|---|---|
| 探査ハブ | 筐体(FM)の製作、電源回路基板の製作、上位ソフトウェア開発、インテグレーション、耐宇宙環境試験、LEV-1/MのI/F調整 |
| タカラトミー 同志社大学 |
筐体の設計、動作検証モデルの制作 |
| ソニーグループ | 制御ボード開発、センサ系開発、通信系開発、下位ソフトウェア開発、画像処理系開発 |
仕様について
| 項目 | 内容 |
|---|---|
| 名称 |
変形型月面ロボット *なおSLIMに搭載される変形型月面ロボットのみ、Lunar Excursion Vehicle 2(略称:LEV-2)が正式名称となる。 |
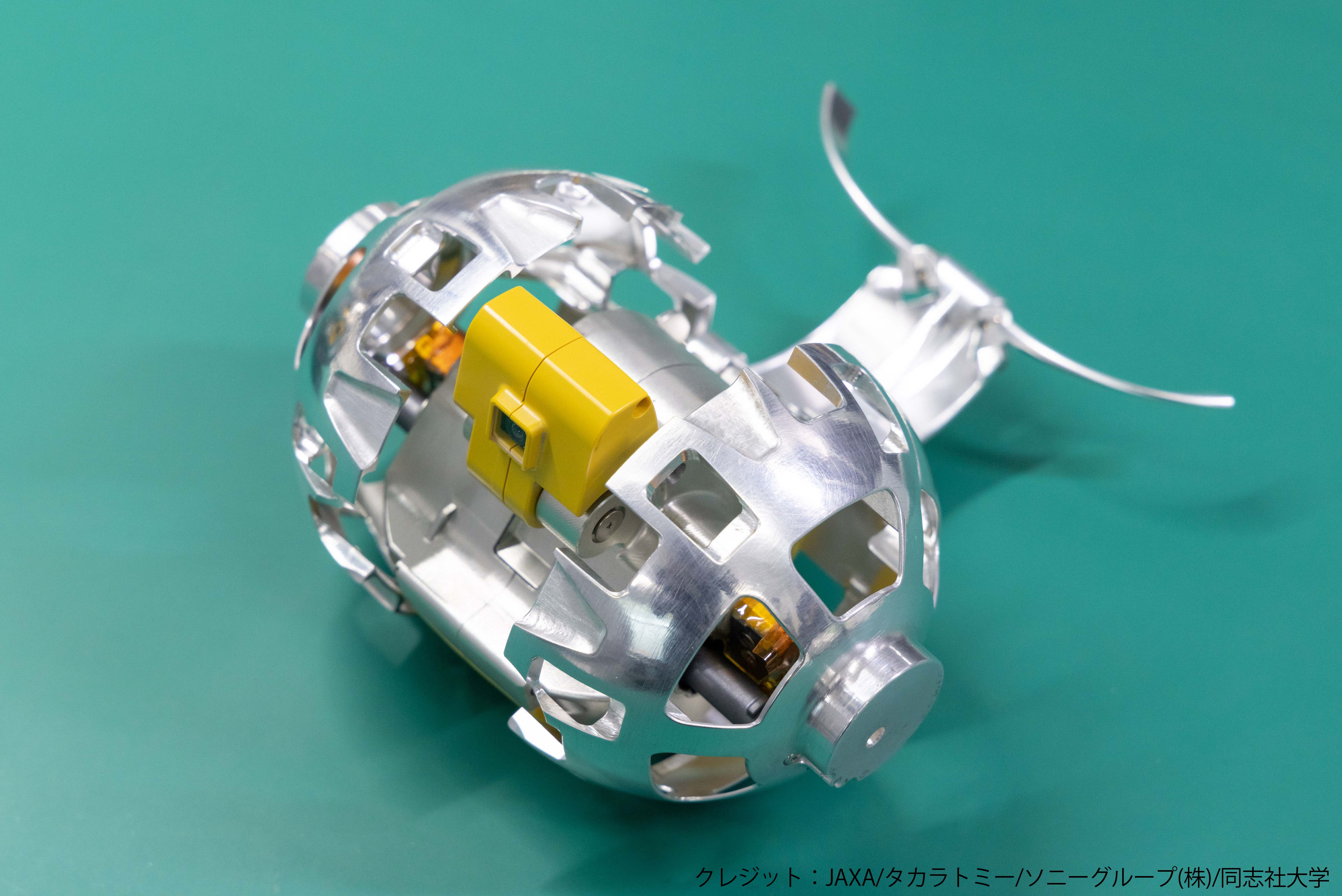
| 愛称 | SORA-Q 「SORA-Q(ソラキュー)」という愛称は、宇宙を意味する「宙(そら)」と、宇宙に対する「Question(問い)」 「Quest(探求)」、「球体」であること、横からのシルエットが「Q」に似ていることなどから名付けられました。 |
| 質量 | 228g |
| サイズ | (変形前)直径78㎜/(変形後)幅約123㎜ 高さ90㎜ 奥行135㎜ |
| カメラ | 前後に1台ずつあるカメラで探査機及び周辺環境を撮像可能。 |
| その他 | LAMPEミッションに使用されるロボットの一部のレゴリス付着防止の表面処理には、探査ハブと株式会社ニデックとの共同研究成果である防じん性能のあるコーティングおよびフィルムが採用されました。 |
SLIMミッションについて
将来の月惑星探査に必要な高精度着陸技術を小型探査機で実証する計画「SLIM(Smart Lander for Investigating Moon)」に搭載され、月面低重力環境下における超小型ロボットの探査技術の実証を行います。自動的に走行、撮影を行い、SLIM探査機本体とその周辺を撮像することで着陸状態を把握します。
SLIMから放出される様子(イメージ図)
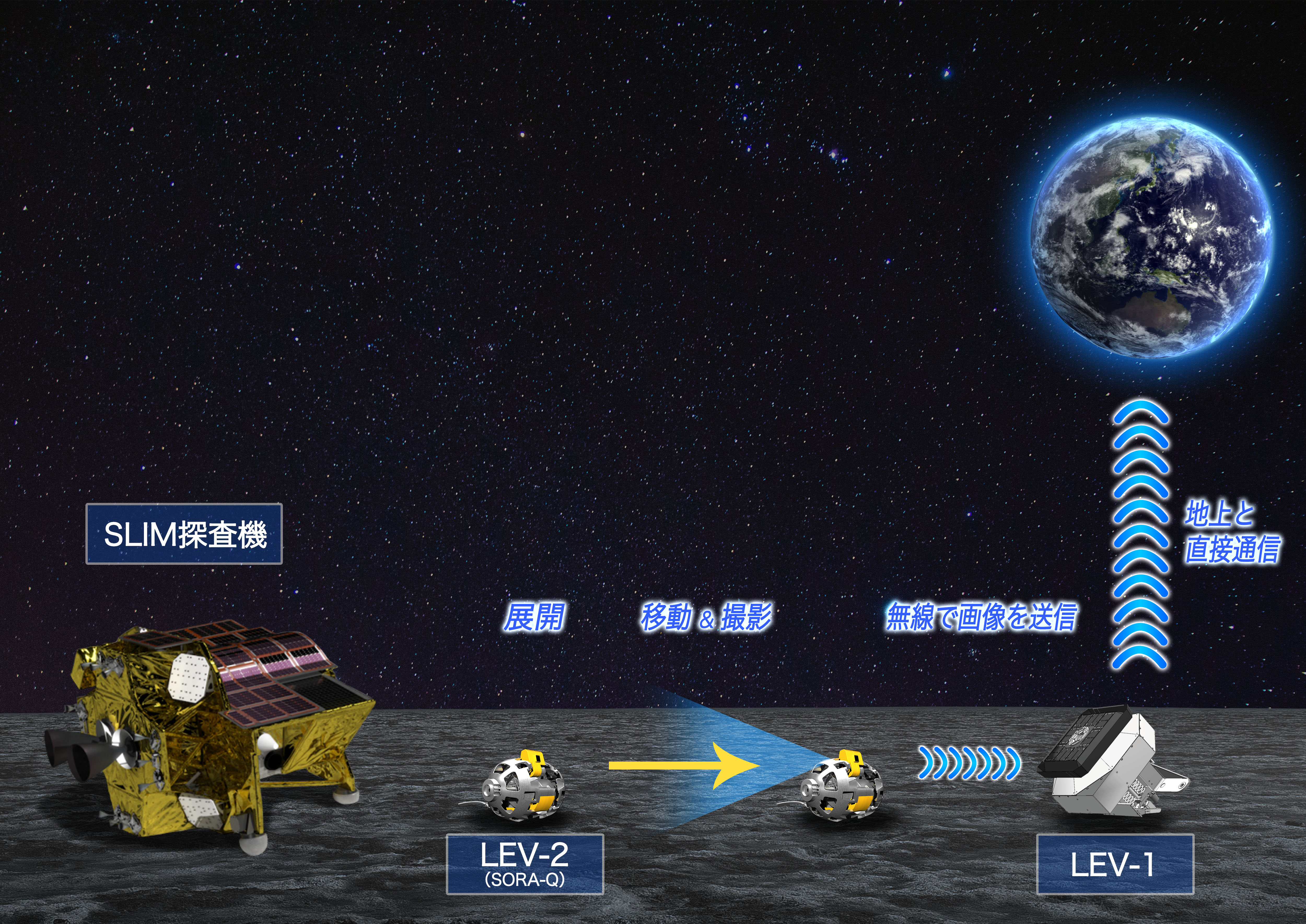
LEV-2が撮影した画像が、LEV-1を通じてデータを地上に送信される(イメージ図)
LAMPEミッションについて
有人与圧ローバの研究開発等に必要な月面データを取得する計画「LAMPE(Lunar surface date Acquisition Mission for Pressurized rover Exploration)」では、地上からのコマンドによって、走行、撮影を行い、レゴリス動特性等の評価や月面のサンプル画像の取得を目指しています。また、民間輸送サービス事業者との連携により、宇宙実証機会や月面輸送機会の利用拡大につなげます。本ミッションは4月26日未明に月着陸を目指しましたが、残念ながらミッションの遂行は困難であると判断されました。変形型月面ロボットの放出やデータ取得はできませんでしたが、開発や運用準備などの知見を今後に活かしていきます。
詳細
| SLIMミッション | LAMPEミッション | |
|---|---|---|
| 完成日 | 2022年3月 | |
| 打ち上げ日 | 2023年8月28日(予定日) 2023年9月7日(実施日) |
2022年12月11日 |
| 搭載ロケット | H-IIAロケット47号機 | SpaceX社 Falcon9 |
| ミッション内容 | SLIM及び周辺環境を撮像 | 将来の有人与圧ローバ走行のためのデータ取得 |
| 月着陸地点 | クレーター「SHIOLI」 | Atlas Crater(北緯47.5度、東経44.4度に位置するMare Frigoris(氷の海)の南東外淵) |
ギャラリー
画像利用については、JAXAデジタルアーカイブスよりお手続きください。




SORA-Q 受賞一覧
| 受賞年 | タイトル | 主催 |
|---|---|---|
| 2026 | 「選考委員会特別賞」を受賞 | 内閣府 第7回宇宙開発利用大賞 |
| 2025 | 内閣総理大臣賞を受賞 | 内閣府 第7回日本オープンイノベーション大賞 |
| 2024 | 第11回ロボット大賞 文部科学大臣賞を受賞 | ロボット大賞 |
| 2024 | ロボット活用社会貢献賞 | 日本ロボット学会 |
| 2024 | Best Planetary Robotics Paper Award | International Conference on Space Robotics 2024 |
| 2023 | Forbes JAPAN Xtrepreneur AWARD 2023 | Forbes JAPAN |
| 2023 | The Best Inventions of 2023 | TIME誌 |
| 2022 | 2022 グッドデザイン・ベスト100 | グッドデザイン賞 |
プレスリリース
- 変形型月面ロボット「LEV-2」による月面実証成果の国際学術誌「Science Robotics」論文採択― 自律運用の解析結果と新たな月面画像の公開 ―
- Research on Lunar Demonstration Results of the Transformable Lunar Rover“LEV-2” Published in Science Robotics— Autonomous Operation Results and New Lunar Image —
- 日本オープンイノベーション大賞内閣総理大臣賞の受賞―産学官連携による日本初・世界最小の変形型月面ロボットの開発―
- Japan’s First and World’s Smallest Transformable Nano Rover Wins Prime Minister’s Award at Japan Open Innovation Prize - Lunar Robot Developed Through Industry-Academia-Government Collaboration -
- 変形型月面ロボットによる小型月着陸実証機(SLIM)の撮影およびデータ送信に成功
- Transformable nano rover successfully captures and transmits image of SLIM lander on the moon(英語版)
- 小型月着陸実証機(SLIM)の月面着陸の結果について
- The results of the Moon Landing by the Smart Lander for Investigating Moon (SLIM)
関連ページ
- From ball to rover: Transformable palm-sized rover SORA-Q for autonomous lunar exploration(ScienceRobotics 掲載)
- 月面で小型月着陸実証機(SLIM)の撮影に成功(JAXA'sWeb版)
- 2025年日本国際博覧会(大阪・関西万博)変形型月面ロボット(LEV-2)愛称「SORA-Q」展示
- LEV-2のSLIM撮影およびデータ送信結果
- 小型月着陸実証機 SLIM(宇宙科学研究所)
- 小型月着陸実証機SLIM(プロジェクトサイト)
- Palm-Sized Lunar Excursion Vehicle 2(LEV-2)
- XRISM×SLIM 特設サイト
- LAMPEミッションについて
- 宇宙探査イノベーションハブ主催 SORA-Qぬり絵コンテスト
- 小型ロボット技術 小型ロボット技術 制御技術(ポスター)
- The Transformable nano rover (Lunar Excursion Vehicle 2(LEV-2), with its nickname”SORA-Q”) for space exploration(英語版特設サイト)
- SLIM、LEV-2(SORA-Q)の撮影した画像が国連切手に採用されました
- ISASニュース7月号(世界最小の月面ロボットLEV-2の挑戦)
- 月面着陸 Behind the scenes: SLIMが新たな歴史を刻んだ夜、その舞台裏では