月面拠点建設を目指した建設機械の制御技術に関する共同研究成果の検証実験
2023年9月21日
国立研究開発法人宇宙航空研究開発機構
宇宙探査イノベーションハブ
JAXA 宇宙探査イノベーションハブは、ヤンマーホールディングス株式会社(以下、ヤンマー)と、2021年から建設機械のいなし・ならい挙動の実現のために、研究課題「力制御機能を有した建設機械の研究開発」に関する共同研究を進めてきました。このたび、2023年8月にJAXA相模原キャンパスの宇宙探査実験棟において、共同研究で構築した力制御機能を実装したロボットアームを月面ローバの研究モデルに搭載し、走行や掘削作業に関する実験を行いました。月面拠点建設のためには、建設機械やローバが月面を移動し、掘削作業を行うことが不可欠ですが、今回の実験を通して、細かな砂で覆われた軟弱地盤でローバが安定して走行し、効率良く掘削作業をできることを確認しました。

【共同研究の背景】
月面の拠点建設や水資源利用では、建設機械やローバ(探査車)によって掘削作業を行います。月面と地上の間には通信遅延が存在するため、連続的な作業を実現するためには、地上から人が操作するのではなく、建設機械やローバが自動・自律的に作業を行うことが求められます。そのためには、地面などの作業対象や環境の急な変化に対して建設機械やローバが即応しなければなりません。
一方、地上においても、作業員不足の解消や生産性・安全性の向上のために、完全無人化に向けた建設作業の自動化技術の開発が進められています。建設現場での無人化を進めるためにヤンマーは、建設機械の従来作業に加えて、人の手を使って行う作業(人作業)の機械化に取り組んできました。人作業の機械化の実現には、作業対象と建設機械の作業ツールに発生する力を適切に扱った制御が必要になります。
そこでJAXAは、ヤンマーと宇宙探査イノベーションハブ 「太陽系フロンティア開拓による人類の生存圏・活動領域拡大に向けたオープンイノベーション」に関する研究提案募集の枠組みの下、建設機械の作業ツールに不意に大きな外力が発生した場合の損傷を回避する「力のいなし」、およびツールを対象にあてがいながら位置合わせを行う「力のならい」を実現する、建設機械の力制御機能に関する共同研究を進めてきました。
【実験の概要】
今回の実験は、ヤンマーとの共同研究で構築した力制御機能について、月面ローバの掘削作業等における有効性を確認する目的で行いました。そのために、別途JAXAが日産自動車株式会社との共同研究で使用する月面ローバ研究モデル(※1)に、力制御機能を実装したロボットアームを搭載しました。実験は、JAXA相模原キャンパスにある宇宙探査実験棟内の宇宙探査フィールド(※2)で実施しました。
月の表面は、細かな砂(レゴリス)で覆われた軟弱地盤であり、またクレータの縁等には急な斜面が存在することが知られています。このような不整地路面での建設機械の作業を想定し、月面ローバ研究モデルの走行機構には履帯機構(クローラ)を使って実験を行いました。4輪駆動・操舵が可能な履帯機構を用いることで、砂地においてもロボットアームを搭載した状態でローバが安定して走行できることを確認しました。
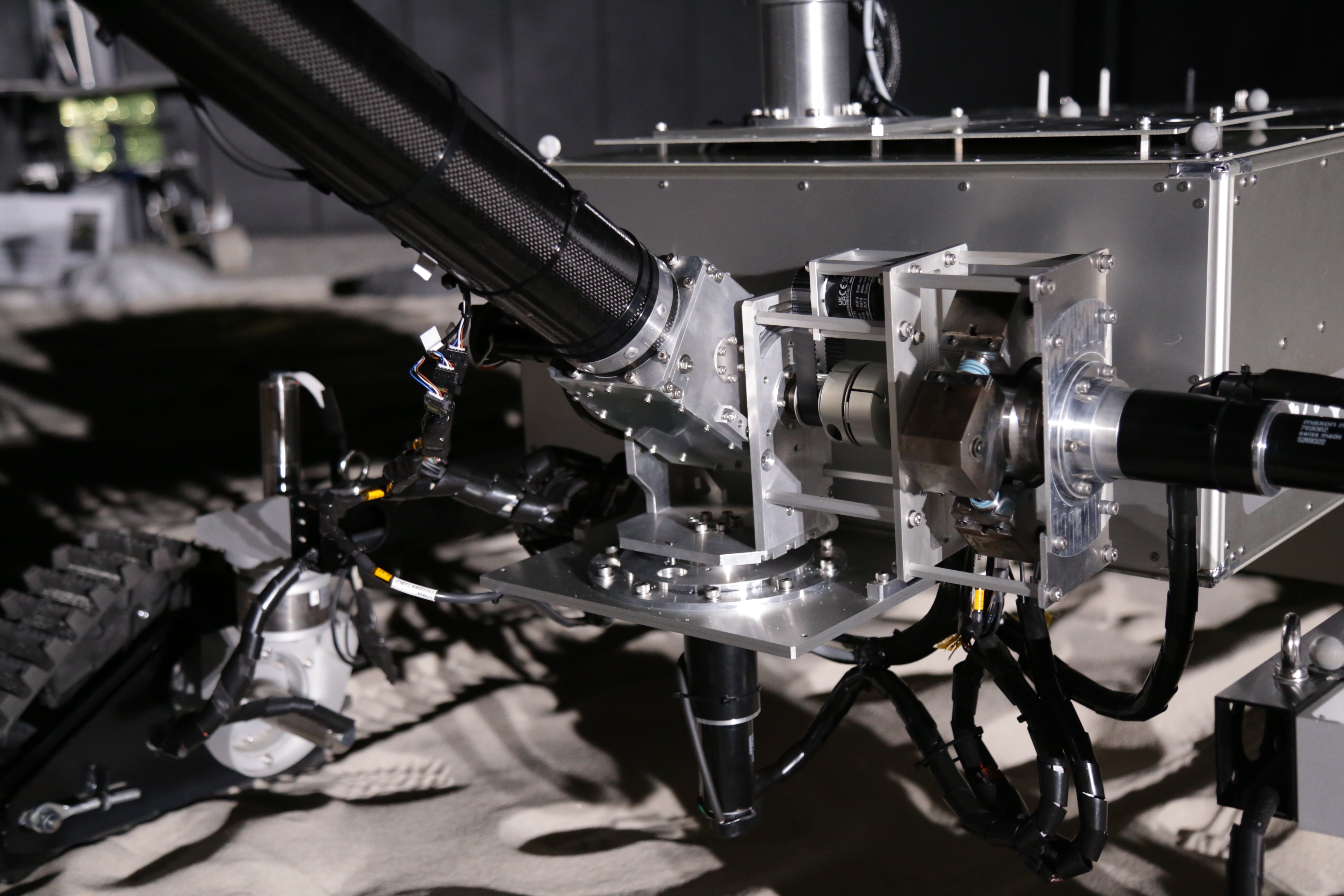
続いて、月面ローバ研究モデルに搭載したロボットアームを用いて掘削実験を行いました。ロボットアームには、本共同研究で新たに構築した力制御機能であるSeries Elastic Actuator(以下、SEA)というアクチュエータシステムが搭載されています。SEAでは、ロボットアームの回転に伴い発生する弾性体(バネ等)の変形量からアームの出力トルクを推定します。推定した出力トルクを適切にフィードバックして、アームの駆動を制御することで「力のいなし・ならい」を実現します。実験では、SEAを搭載したロボットアームを用いて、ローバが効率よく掘削作業をできることを確認しました。
実験の結果、ロボットアームを搭載した状態においてもローバが安定して走行し、力制御機能を実装したロボットアームによって効率よく掘削作業ができることを確認しました。実験を通して、将来の月面の拠点建設や水資源利用の実現につながる成果が得られたと考えています。
【今後の展開】
今後、本成果を活用し、JAXAは、将来の月面の拠点建設や水資源利用で必要となる建設機械やローバの力制御技術の確立を目指します。また、ヤンマーは、地上の建設現場の完全無人化を目指し、本成果を建設機械に適用したプロトタイプの制作や現場実証実験を進めることで、技術の完成度を高めていきます。
※1 月面ローバの研究モデルを用いた屋外自然環境での走行実験について ― JAXAと日産自動車e-4ORCEの共同研究 ―
※2 宇宙探査実験棟
【宇宙探査実験棟における月面ローバ研究モデルを用いた走行・掘削実験の様子】
※写真をクリックすると拡大します